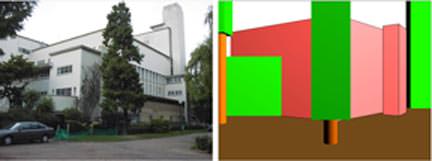
Bauletter, BAULINKS.de-Meldungen, vom 13.9.2010Bauklotz-Blick für besseres maschinelles SehenForscher an der Carnegie Mellon University (CMU) setzen auf virtuelle Bauklötze, damit Computer ihre Umgebung besser erfassen können. Hintergrund ist, dass die Maschinen oft nicht in der Lage sind, Bilder von Freiluftumgebungen zu interpretieren. Im Prinzip geht der Computer beim CMU-Ansatz daher wie ein Kind vor, das ein Gebäude mit Bausteinen nachbaut. "Wenn der Computer ein Bild Block für Block nachstellen kann, wird er die Szene besser verstehen", sagt der CMU-Robotiker Abhinav Gupta. Das ist beispielsweise für Roboter wichtig, die selbst eine Bewegungsroute planen sollen.
"Wenn Menschen ein Foto ansehen, verstehen sie, dass die Szene geometrischen Einschränkungen unterliegt", sagt Gupta. Gebäude etwa haben eine Tiefe und Türme sind im Normalfall nicht schief. Dadurch können wir uns vorstellen, wie eine zweidimensional abgebildete Szene real aussieht. Vergleichbares wollen die Forscher für maschinelles Sehen durch ihren Bauklotz-Ansatz ermöglichen. Dazu nimmt der Computer für Objekte in der Szene wahrscheinliche Formen an, die ihm als Basis für den virtuellen Nachbau dienen. Dann versucht der Computer, die Formen im Bild mithilfe virtueller Quader und anderer Bausteine zu rekonstruieren. Würde ein Block dabei über dem Boden schweben, ist das für die Software ein Zeichen, dass er entweder eine falsche Form angenommen hat oder aber ein Objekt im Bild teilweise verdeckt ist. Mit diesem Ansatz für die Szenenanalyse kann es auf die Dauer möglich werden, dass Computer sinnvolle Schlüsse über Bereiche zwischen und sogar hinter sichtbaren Objekten auf einem Bild ziehen, so Alexei Efros, Professor für Robotik und Informatik an der CMU. Die Forscher sind davon überzeugt, dass künstliche
Intelligenzen mit ihrem Ansatz gerade Freiluftszenen sinnvoller
interpretieren können als bisher. Ein anderer Ansatz der
CMU-Forscher, der eine ungefähre 3D-Rekonstruktion ähnlich einem
Aufklapp-Buch liefert, hat sich nur bedingt bewährt. Denn die
resultierenden Darstellungen sind fallweise schlichtweg absurd.
Die Methode, einzelne Objekte zu erkennen, wiederum liefert keine
Information darüber, wo sich beispielsweise begehbare Flächen
befinden. Genau dieses Detail ist aber wichtig, wenn Roboter
mithilfe eines Bildes einen Weg durch die Umgebung suchen sollen.
Autodesk BIM
Conference 2010 am 28.9.
14.
buildingSMART Forum am 29.9. im BMVBS
6. BIM
Anwendertag des buildingSMART e.V. am 12.11. beim Bayerischen
Bauindustrieverband
AutoCAD für Mac
sowie AutoCAD-Apps für iPad und iPhone
Wintergarten-Statikprogramm von Reynaers
EXPO REAL: Einblick in
Strategiepläne 2020 von conject
baupreislexikon.de meldet
45.000 eingetragene Anwender
100 weitere Musterbriefe
beim Online-Dienst Baufachlexikon
RIB-Software-Gruppe mit
Umsatzplus
|